Kurs praktycznego wykorzystania programu ATP - EMTP (część 9.)

W dziewiątej części kursu zostanie zaprezentowany praktyczny przykład wykorzystania pakietu ATP do obliczania prostych układów napędowych z wykorzystaniem różnego rodzaju silników asynchronicznych 3-fazowych.
Napędem elektrycznym nazywamy zespół współpracujących ze sobą urządzeń przetwarzających energię elektryczną w mechaniczną. W dalszej części artykułu zostanie zaprezentowany praktyczny przykład wykorzystania programu ATP do obliczeń układów napędowych na podstawie najbardziej popularnego silnika asynchronicznego klatkowego. Ma on wiele zalet i jest powszechnie stosowany w przemyśle, ale również w sprzęcie domowym. Na ten typ silników przypada ponad 90% mocy zainstalowanej, biorąc pod uwagę ogólną liczbę maszyn indukcyjnych i ich moc. Wśród zalet należy wymienić zarówno prostą budowę, pewność ruchową, łatwą obsługę, jak i stosunek wymiarów gabarytowych silnika do jego mocy. Główną wadą wszystkich silników asynchronicznych jest utrudniona regulacja prędkości. Wymaga ona stosowania skomplikowanych układów przekształtnikowych sterowanych cyfrowo. W dalszych częściach kursu zaprezentowane zostaną również takie rozwiązania. Na obecnym etapie poprzestaniemy na prostym układzie źródło zasilania – silnik – obciążenie na wale. Dokładne zrozumienie tematyki poruszanej w tej części kursu wymaga posiadania wiedzy teoretycznej z zakresu maszyn elektrycznych.
Silnik 3-fazowy
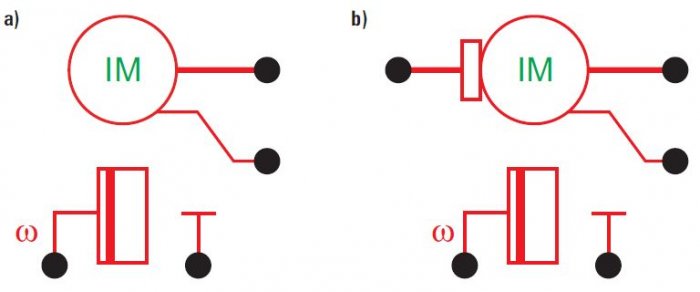
W programie ATP silnik klatkowy 3-fazowy należy do grupy „Machines” i reprezentowany jest przez element o nazwie UM3 Induction (rys. 1a), zaś silnik pierścieniowy 3-fazowy reprezentowany jest przez UM4 Induction (rys. 1b).
Praktyczny przykład będzie oparty na typowym silniku klatkowym 3-fazowym typu Sf56-2B o parametrach przyjętych zgodnie z jego tabliczką znamionową (fot. 1.). Układ napędowy jest zasilany 3-fazową linią kablową Un=0,4 kV, uzwojenia stojana połączone są w gwiazdę, obciążenie silnika liniowo zależne od prędkości.
Aby umożliwić analizę układów z przekształtnikami i maszynami synchronicznymi, w programie ATP wykorzystano transformatę Parka w celu opisu parametrów znamionowych silnika. Wyznaczenie parametrów silnika na podstawie tylko tabliczki znamionowej wymaga zastosowania skomplikowanego aparatu matematycznego, dlatego w celu ułatwienia obliczeń powstał prosty program Induction Motor Data (IMD), który na podstawie tylko podstawowych danych potrafi wyznaczyć parametry zastępcze silnika przeliczone zgodnie z założeniami transformaty Parka. Program jest dostępny bezpłatnie na stronie internetowej http://pp.kpnet.fi/ijl/motdatpr.zip lub poprzez wyszukiwarkę GOOGLE – licencja FREEWARE. Jego posiadanie jest wymagane, aby móc kontynuować przytoczony poniżej tok postępowania.
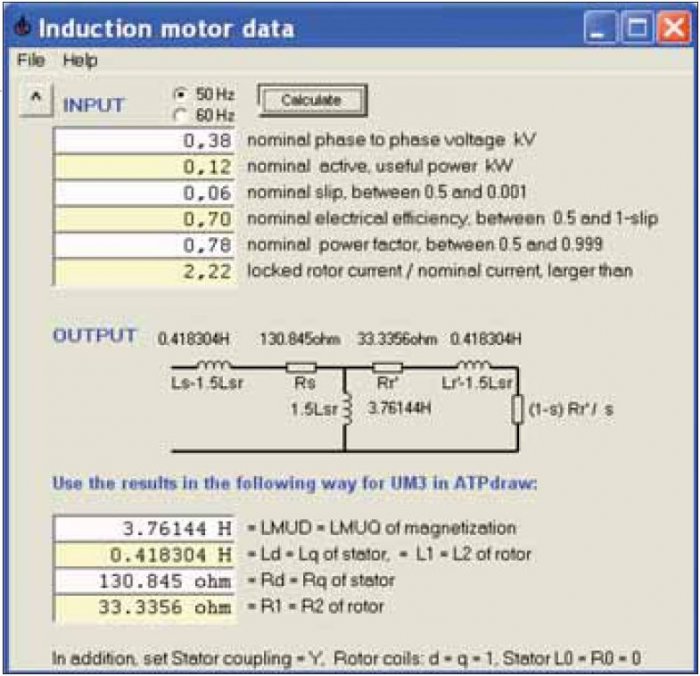
Pierwszym krokiem, jaki należy podjąć, aby móc zamodelować silnik w ATP, jest wyznaczenie jego parametrów zastępczych. Po uruchomieniu programu IMD wymagane jest wprowadzenie następujących danych wejściowych:
- częstotliwości sieci 50 lub 60 Hz – wybieramy 50 Hz,
- znamionowego napięcia pracy silnika przy połączeniu stojana w gwiazdę (nominal phase to phase voltage kV) – na podstawie tabliczki znamionowej wprowadzamy do programu wartość 0,38,
- znamionowej mocy silnika (nominal active, useful power kW) – wprowadzamy do programu wartość 0,12,
- znamionowego poślizgu silnika – wprowadzona wartość powinna się zawierać w granicach od 0,5 do 0,001 (nominal slip, between 0,5 and 0,001). Na podstawie prędkości znamionowej dokonujemy prostych obliczeń (wynik wprowadzamy do programu):

-
- gdzie:
s – poślizg,
n1 – prędkość synchroniczna silnika, w [obr./min],
n – prędkość znamionowa silnika, w [obr./min].
- gdzie:
- znamionowej sprawności silnika – wprowadzona wartość powinna się zawierać w granicach od 0,5 do 1-s (nominal electrical efficiency, between 0,5 and 1-slip). Sprawność typowego silnika klatkowego mieści się granicach od 0,7 do 0,9, w zależności od wielkości danej jednostki. Do obliczeń przyjmujemy 0,7,
- znamionowego współczynnika mocy cosϕ – wprowadzona wartość powinna zawierać się w granicach od 0,5 do 0,999 – na podstawie tabliczki znamionowej przyjmujemy cosϕ=0,78,
- znamionowego prądu zwarcia silnika – wprowadzona wartość musi być minimalnie 1,5 większa niż prąd znamionowy silnika (locked rotor current/nominal current, langer than 1,5). Wyznaczenie tego prądu wymaga przeprowadzenia próby zwarcia silnika. Przy braku takowych możliwości przyjmujemy, iż prąd zwarcia modelowanego silnika jest 6 razy większy od znamionowego – stąd wprowadzamy wartość 0,37⋅6=2,22, w [A].
Po zakończeniu wprowadzania wymaganych przez program danych wywołujemy procedurę obliczeniową. Poprawnie wprowadzone dane wraz z wynikami obliczeń zaprezentowano na rysunku 2.
Po tym wstępnym etapie użytkownik może przejść do poziomu ATP i samodzielnie zamodelować układ napędowy zadany na wstępie zgodnie z kolejnymi krokami:
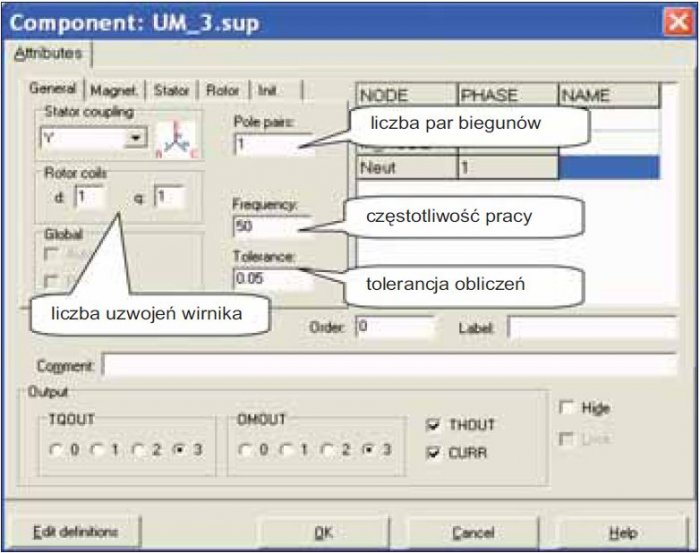
Krok 1.: umieszczamy na schemacie element UM3 Induction i przechodzimy do edycji jego parametru. Podstawowym parametrem każdego silnika jest jego prędkość. Z punktu widzenia programu ATP determinuje to pierwszy z parametrów koniecznych do wprowadzenia; liczba par biegunów. W tabeli 2. zawarto zestawienie wartości prędkości synchronicznych dla odpowiedniej liczb par biegunów. Producenci zazwyczaj podają prędkość znamionową silnika przy znamionowym obciążeniu na wale. Należy pamiętać, iż to moment oporowy powoduje spadek prędkości silnika, stąd wynikają różnice między prędkościami silnika podanymi na tabliczce znamionowej a wynikającymi z ich budowy wewnętrznej (liczby par biegunów i częstotliwości sieci). Prędkość znamionowa silnika Sf56-2B wynosi 2800 obr./min, dlatego też liczba par biegunów wynosi p=1 (pole pairs) (rys. 3.).
Krok 2.: do obliczeń przyjmujemy, że uzwojenia stojana połączone są w gwiazdę (stator coupling) (rys. 3.).
Krok 3.: obliczenia w ATP prowadzone są metodami iteracyjnymi. W przypadku analizy układów z silnikami konieczne jest prowadzenie tolerancji wyznaczania prędkości na wale. Przyjęta zostanie na poziomie 5 %, stąd parametr TOLERANCE= 0,05 (rys. 3.).
Krok 4.: na podstawie obliczeń przeprowadzonych za pomocą programu Induction Motor Data parametr ROTOR COILS (tłumacząc bezpośrednio z języka angielskiego „uzwojenia wirnika”) ustawiamy odpowiednio d=1 oraz q=1.
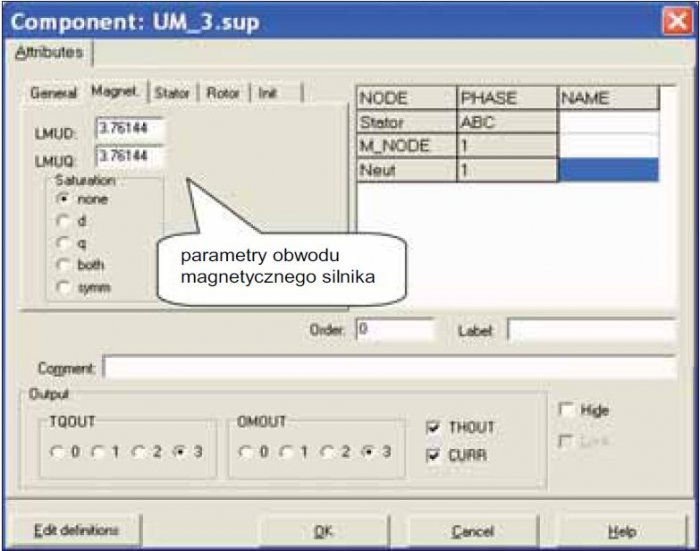
Krok 5.: przechodzimy do zakładki MAGNET (obwód magnetyczny silnika) i wprowadzamy kolejne parametry uzyskane podczas wstępnych obliczeń LMUD=3,76144 H oraz LMUQ=3.76144 H (rys. 4.).
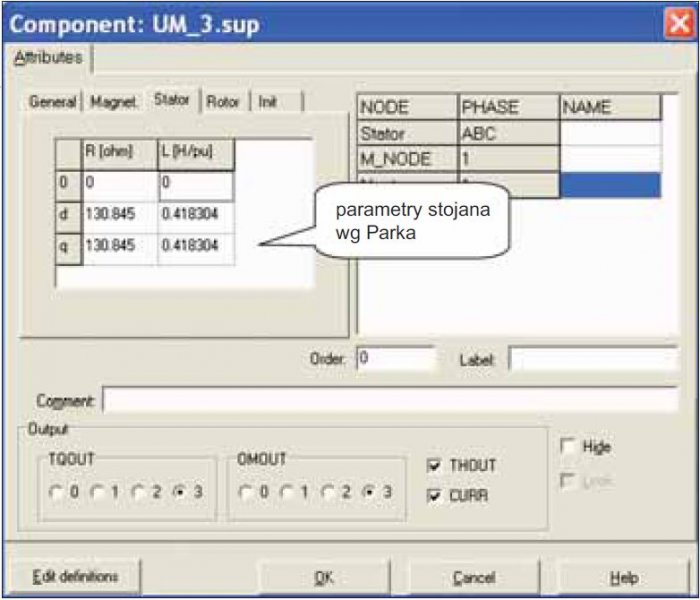
Krok 6.: przechodzimy do kolejnej zakładki, tym razem STATOR (stojan) i wprowadzamy (parametry uzyskane za pomocą programu Induction Motor Data) (rys. 5.): R0=0, w [Ω], Rd=130.845, w [Ω], Rq=130.845, w [Ω], L0=0, w [H], Ld=0.418304, w [H], Lq=0.418304, w [H].
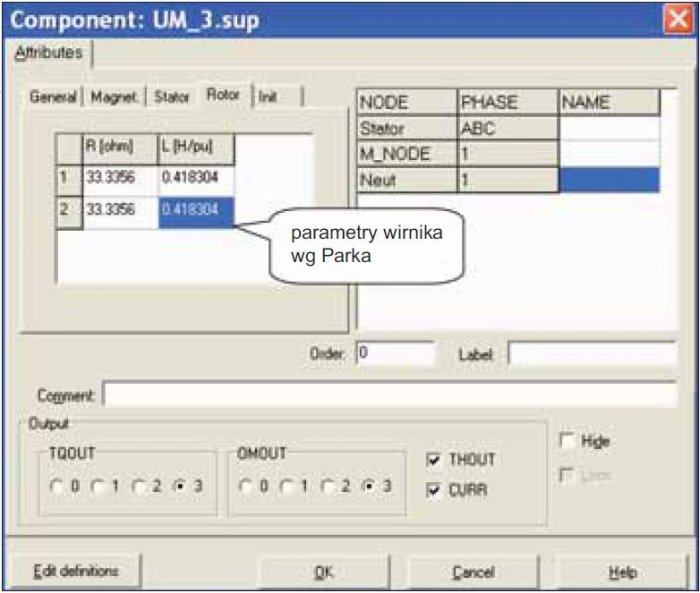
Krok 7.: przechodzimy do zakładki ROTOR (wirnik) i wprowadzamy (parametry uzyskane za pomocą programu Induction Motor Data) (rys. 6.): R1=33.3356, w [Ω], R2=33.3356, w [Ω], L1=0.418304, w [H], L2=0.418304, w [H].
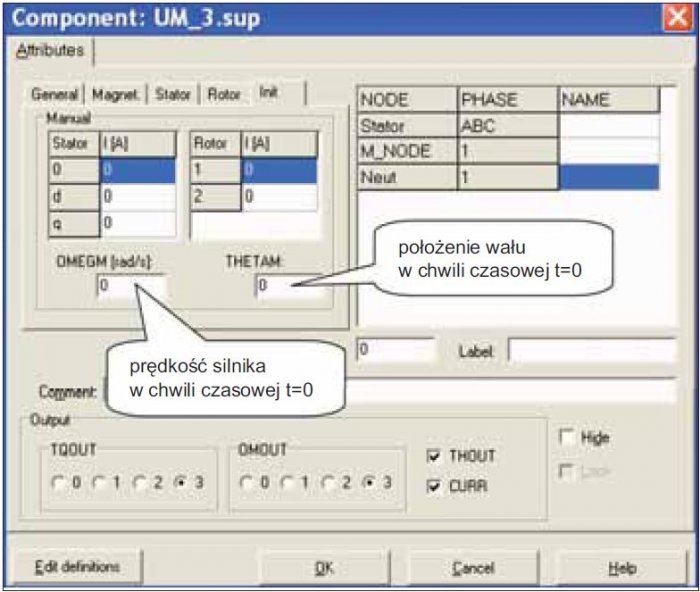
Krok 8.: w zakładce INIT definiowane są parametry opisujące stan silnika w chwili czasowej t=0 (prąd stojana i wirnika w układzie 0dq, prędkość kątowa silnika OMEGAM [rad/s], początkowe położenie wirnika względem stojana THETAM [rad]). W opisywanym przykładzie przyjmujemy, iż w chwili t=0 wał silnika jest nieruchomy – zerowe warunki początkowe (rys. 7.).
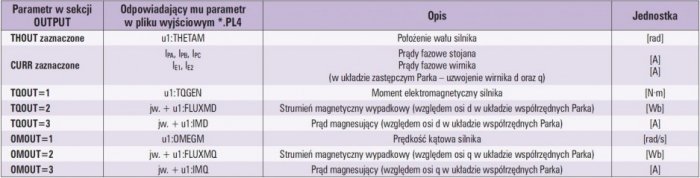
Krok 9.: Ustawiamy w części OUTPUT okna elementu UM_3 parametr TQOUT=3 oraz OMOUT=3. Zaznaczamy również THOUT i CURR (rys. 3.). Parametry TQOUT i OMOUT determinują wyniki obliczeń przeprowadzanych za pomocą ATP (tab. 1. i rys. 3.)
Krok 10.: zatwierdzamy zmiany wybierając OK.
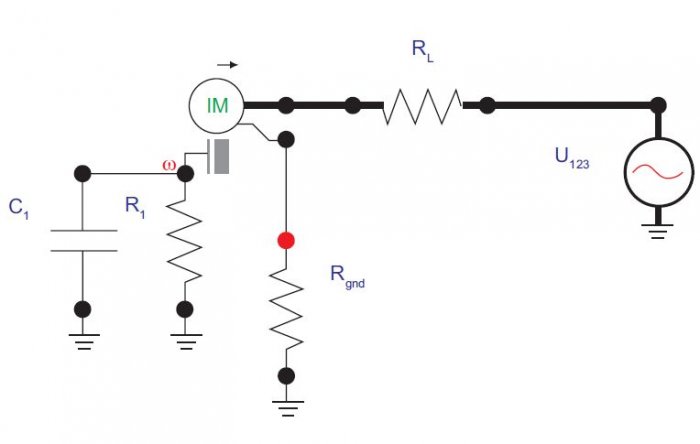
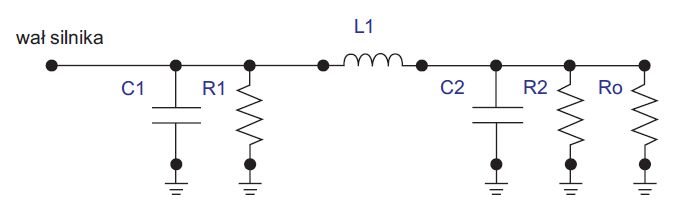
Krok 11.: tworzymy układ zgodnie ze schematem zamieszczonym na rysunku 8.
Krok 12.: wprowadzamy parametry obwodu: C1=100, w [μF], R1=1000, w [Ω], Rgnd=2, w [Ω], RL=0,1, w [Ω], U123=326,59, w [V], f=50, w [Hz], Pha=(-90), w [°], Tsta=0, w [s].
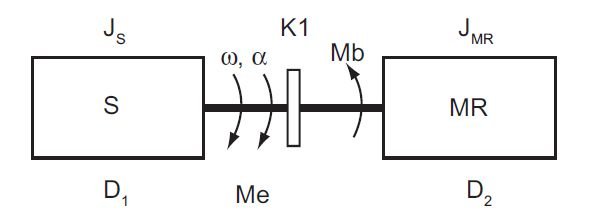
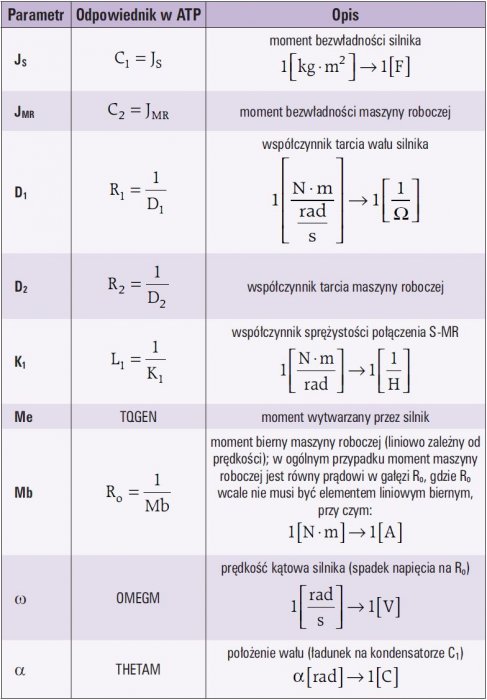
W tym momencie komentarza wymagają dwa użyte elementy – C1 i R1. Odwzorowują one część mechaniczną analizowanego układu napędowego (rys. 9., rys. 10. i tab. 3.). W analizowanym przykładowym układzie napędowym przyjęto obciążenie silnika momentem liniowo zależnym od prędkości. Po pominięciu współczynnika sprężystości i zwinięciu elementów powstał schemat zamieszczony na rysunku 8. Wartości C1 i R1 dobrano, mając na uwadze moment krytyczny silnika. Zachęcam w tym momencie do przeprowadzenia własnych prób – ciekawe zjawisko występuje po obciążeniu silnika momentem większym od znamionowego.
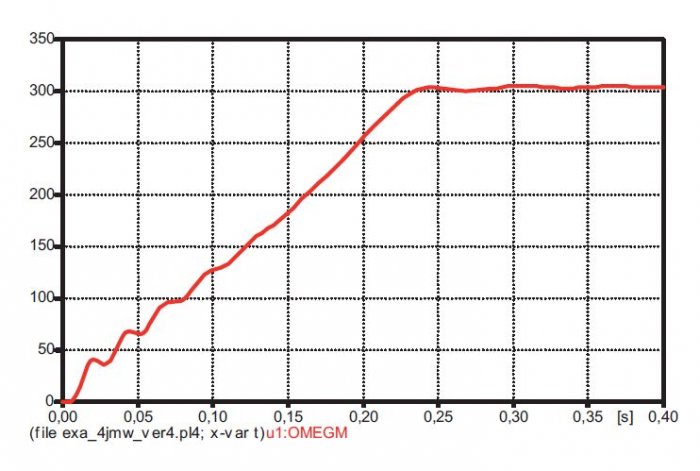
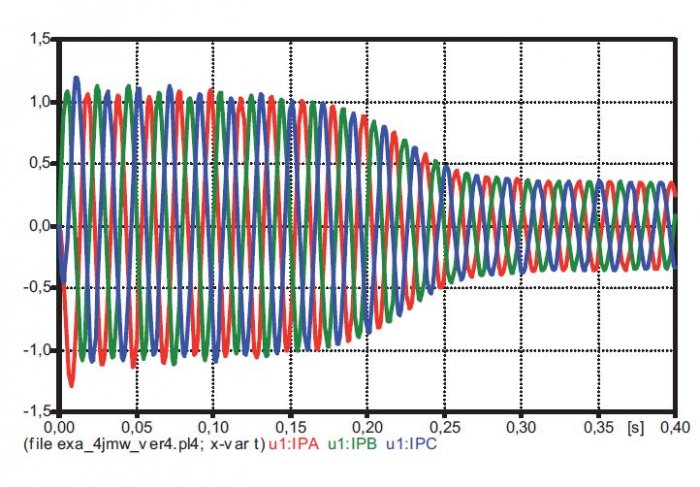
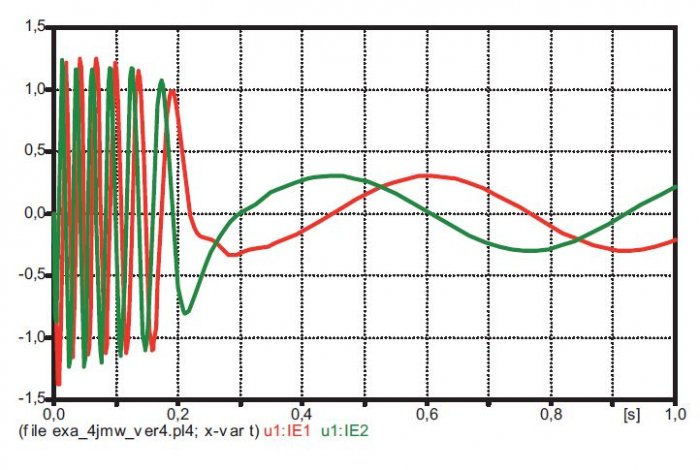
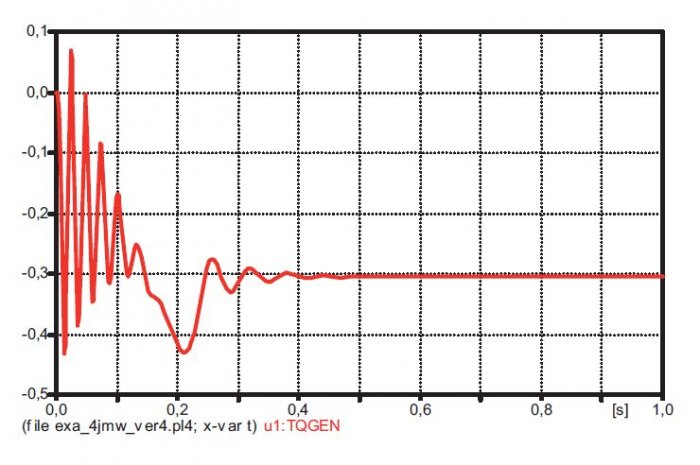
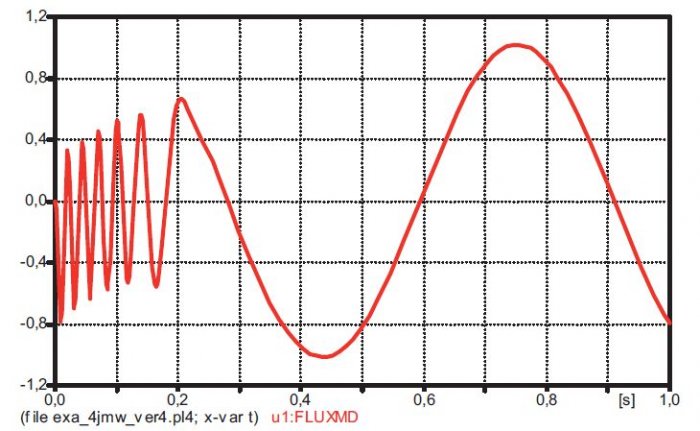
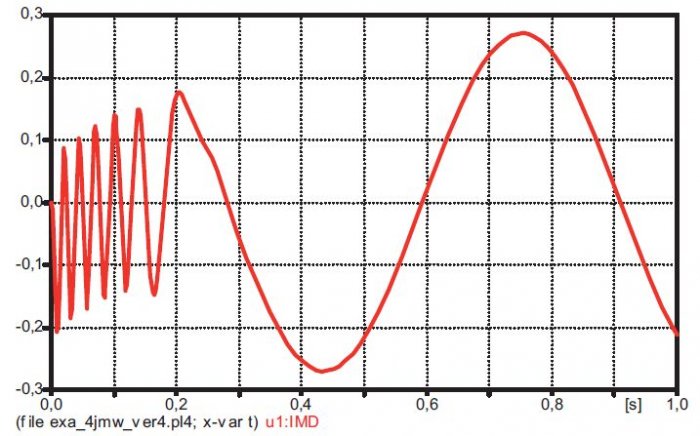
Krok 13.: przeprowadzamy obliczenia (wyniki –rys. 11., rys. 12., rys. 13., rys. 14., rys. 15. oraz rys. 16.).
Podsumowanie
W przytoczonym przykładzie zastosowano liczne uproszczenia podczas przeliczania parametrów silnika, zgodnie z założeniami transformaty Parka. Procedura postępowania w przypadku obu typów silników, klatkowego i pierścieniowego, jest praktycznie taka sama. Różnice wiążą się bezpośrednio z różnicami wynikającymi z konstrukcji obu maszyn (wirnika). Artykuł stanowi wprowadzenie do tematyki silników w pakiecie ATP. Osoby, które chciałyby dogłębnie poznać i wykorzystać program odsyłam do dokumentacji [1]. Wskazane jest również zapoznanie się z manualną metodą przeliczania parametrów silnika.
Literatura
- ElectroMagnetic Transients Program (EMTP) Rule Book, http://www.eeug.org